下載投融界APP
隨時隨地獲取新鮮資訊
服務熱線:400-858-9000 咨詢/投訴熱線:18658148790
在武漢這個被戲稱為充滿了“超雄司機”的城市里,無人駕駛出租車蘿卜快跑強行融入了車水馬龍之中。價格優惠、給開空調、沒有異味、不會拒載,是很多人眼中蘿卜快跑的優點所在。
不太趕時間的前提下,也有不少人懷抱好奇體驗了乘坐無人駕駛出租車的感覺,然后就會發現Robotaxi好像不會和人那樣搶道、別車、加塞,不夠靈活變通。
雖然因為不時出現停擺、卡頓,甚至造成小范圍擁堵,蘿卜快跑會被武漢人笑罵為“苕蘿卜”,但不少司機還是視“苕蘿卜”為強有力的競爭者,擔心自己成為科技前進過程中那個被車輪碾壓的人。
以蘿卜快跑目前的業務量,還遠沒有到可以影響就業市場的程度,最需要關注蘿卜快跑動態的還是資本市場。對計算機、電子、汽車、電新等行業的研究員和專家來說,蘿卜快跑如果能成功運營下去,無疑會對產業鏈產生巨大影響。
蘿卜快跑被密集調研的同時,作為幕后推手的百度股價方面卻反應不佳,單日大漲近10%之后就開始劇烈震蕩,資本市場對其All in AI戰略成果的觀望情緒明顯。
畢竟百度近十年在自動駕駛研發上投入了1500億元,目標不能只是爭奪網約車市場那點份額。
技術
蘿卜快跑背后的大功臣是百度地圖。
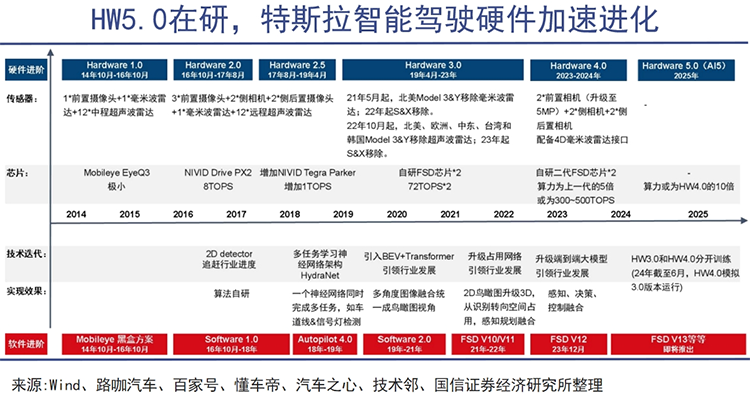
首先要明確的一點是,無人駕駛和人工智能的發展已經是歷史必然的進程之一,即便沒有本土的“蘿卜快跑”,以特斯拉為代表的“洋蘿卜”們總有一天,也會靠著先進的技術和創新的服務模式殺入中國市場。
現在的情況是蘿卜快跑先在武漢出圈,并且很快會嘗試去更多城市運營,特斯拉的Robotaxi原型車卻要推遲到10月發布了。這里面很重要的一個影響因素就是,有百度地圖加成的蘿卜快跑在道路測試數據上很有優勢。
百度自動駕駛技術部總經理徐寶強曾說過,在城市地圖采集、運營準備、換電服務等工作完成后,百度Apollo在一座新城市完成全域無人駕駛運營準備僅需半年時間。“此后,百度地圖覆蓋的區域,蘿卜快跑無人車就能運營”。
不少乘客都分享過,蘿卜快跑無人車只能沿著規劃好的路線跑,不會按照他們的要求抄近路、靠邊停等等,這里面除了安全方面的考慮,恐怕還是因為無人車現階段較為依賴高精地圖的“指揮”。
理想情況下,無人車可以通過攝像頭得到視覺圖像數據、激光雷達得到主動光傳感器數據,然后利用感知網絡對視覺和主動光特征進行識別,判斷出道路特征、障礙物,最后通過大模型學習、鍛煉決策能力,實現端到端的無人駕駛。
形成類人的決策能力是其中最難的一步,更討巧的做法則是利用好高清地圖的導航能力,讓無人車沿著安全路線行駛,類似框定考試范圍的感覺。所以蘿卜快跑在武漢測試伊始,便在不斷調整、升級試駕路段的高精地圖。
在這種做法下,識別障礙物就成了另一個關鍵問題。據說蘿卜快跑在改造、迭代無人車型時,就在雷達方面下了不少功夫,用四個扇形雷達代替了一個主激光雷達,以更好的在中短距離內確定障礙物的距離和方位。
與蘿卜快跑等國內廠商不同,特斯拉在改進無人車型時是明顯減少了激光雷達的數量的。因為特斯拉FSD采取的是純視覺方案,攝像頭的重要性高于激光雷達,如果成功就能提供更類人駕駛體驗,在部分場景自主發掘出超越地圖導航表現。
近期也有消息稱,小鵬汽車的第四季度新車型將不會使用任何激光雷達,而是轉向類似于特斯拉 FSD 的純視覺智駕解決方案,畢竟何小鵬今年在美國加州體驗了特斯拉FSD V12.3.6版本后對其給予了較高的評價。
不過FSD此類的純視覺方案的痛點在于,需要海量現實數據和高精軌跡供大模型進行特征分析、訓練、驗證,最后才能迭代出一個高度精準的AI算法。
中國政府雖然歡迎特斯拉FSD入華,但在數據和地圖的獲取能力上,特斯拉大概率不會比百度做的更好。蘿卜快跑大可以憑借百度地圖多年積累的優勢,形成其競爭壁壘。
盈利
蘿卜快跑試圖通過規模效應實現盈利。
技術路線的優劣暫且不論,投資者、從業者最關心的還是蘿卜快跑的商業模式能否跑通,或者說,蘿卜快跑的長期盈利能力如何。
雖然武漢等地的訂單大爆發,但蘿卜快跑目前還屬于燒錢補貼、吸引客戶的階段,如果不使用優惠折扣,蘿卜快跑的價格其實是遠高于滴滴快車的。

滴滴每公里價格最低約為2.1元,最高為2.8元,而相同距離情況下,蘿卜快跑每公里最低單價約為4.6元,最高約為6.2元,只是蘿卜快跑會在此基礎上打3.5-5折來補貼客戶。
近期蘿卜快跑在武漢每車日均峰值訂單數在20左右,距離以中短途為主,那么假設平均每天每車接客15單、每單10公里、給客戶3.5折優惠券,則客單價約為18.2元,平均每公里收費1.82元,每日每車收入約272元。
從成本端來看,目前蘿卜快跑單車日均成本恐怕在400元以上,大頭來自單車制造成本,因為百度旗下Apollo(阿波羅)第五代車造價48萬元,折算至每日成本就要263元。
另外還要加上日常維修保養費用,保險費用、補能成本在內的日常運營成本,和雇傭遠程安全員監測無人車的安全運維成本,即便是在武漢這種物價、工資相對較低的地方,這部分的日均成本也肯定超過100元了。
所以在單車日均成本下降之前,即便蘿卜快跑無人車每日接單量超過20單,也不能百分百保證實現盈虧平衡。好消息是,百度Apollo的第六代無人車單車成本有望下降至20.48萬元,將大大減輕蘿卜快跑的盈利壓力。
而第六代無人車的造價能大幅下降,主要就是得益于規模效應和供應鏈管理的優化。比如激光雷達等關鍵零部件,百度Apollo就可以靠大規模采購帶來的議價能力,讓禾賽科技這種供應商給出一個較優惠的價格。
而且百度Apollo考慮到無人車的特性,也可以把許多圍繞主駕駛位有人才需要的冗余系統去除掉,再搭配自己研發、生產的傳感器和計算單元,進一步降低不必要的成本。

日常運營成本和安全運維成本也是同理,訂單規模越大、車輛閑置時間越短,平攤到每輛車上的停車費、維修費、安全員工資等支出就可以越少。
尤其是北上廣深這種大城市開放無人駕駛之后,蘿卜快跑理論上還是可以通過武漢的安全員進行云監測,人車比也可以從1:2、1:5提升到1:10、1:20,對比那些要考慮一線城市人力成本的競爭對手,還是有一定優勢的。
百度曾表示,隨著蘿卜快跑無人車自動運營網絡完成建設,營運成本將降低30%,通過自動駕駛技術和人車艙效率的持續優化,服務成本將降低80%。
對于蘿卜快跑的盈利預期,百度和高盛等外部投資機構都較為樂觀,計劃到2024年底在武漢實現收支平衡,在2025年全面進入盈利期。
藍圖
蘿卜快跑還不是百度All in AI戰略的里程碑。
蘿卜快跑能快速實現盈利并做大做強,對百度來說當然是一件好事,但對百度All in AI的戰略布局來說,蘿卜快跑的這一點成功還不夠。
2023年,百度致力于全面深化旗下各類產品及服務的“AI原生化重構”戰略,成功推出了百度新搜索、百度新文庫等一系列AI原生應用,同時還推出了輕舸、品牌智能體等創新的AI營銷工具。
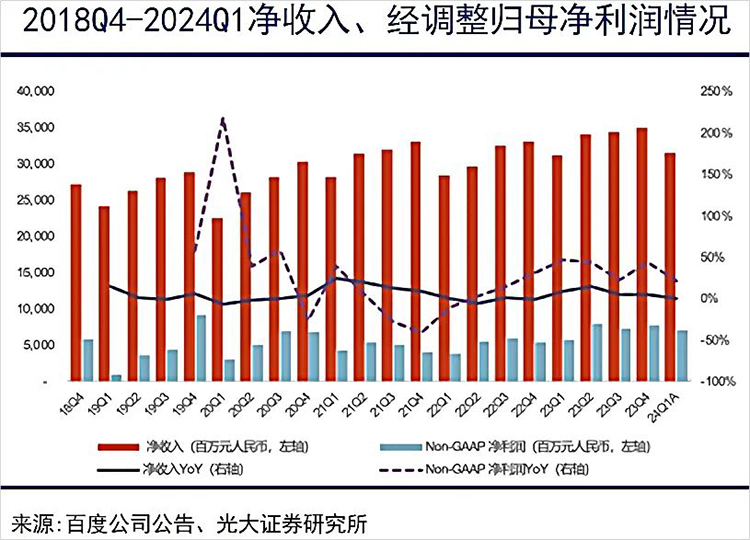
但是現階段,AI的研發成果主要還是體現在為百度傳統核心業務帶來增量收入上。根據財報,文心一言在2023Q4給云業務帶來了約6.6億元的增量收入,預計將在2024年貢獻數十億元人民幣的增量收入。
李宏彥雖然也在財報會議中表揚了蘿卜快跑訂單增長迅速,但Robotaxi的運營大概不是百度研發無人駕駛技術的核心目標,對公司資產及收入影響有限,更關鍵的作用還是體現在技術進步對公司估值的加持上。
畢竟按照高盛等機構的樂觀估計,2025年1000輛RT6的年利潤為900萬元人民幣,即便蘿卜快跑按照李宏彥希望的,2025年擴到65城、2030年擴到100城,這塊業務的利潤也很難有百億量級,還可能引發司機群體抗議等問題。
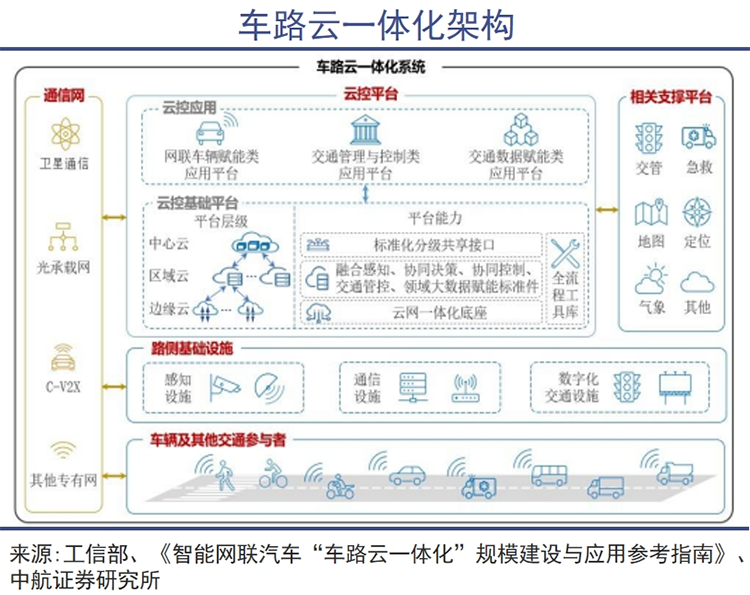
車路云一體化,才是百度這樣的公司值得大展拳腳的地方,也是政府政策樂于支持的發展方向。
隨著2023-2024年《關于開展智能網聯汽車準入和上路通行試點工作的通知》和《關于開展智能網聯汽車“車路云一體化”應用試點工作的通知》的發布,車路云一體化實踐無疑又被推升了一個高度。
雖然蘿卜快跑在沒有車路云一體化建設的城市里,單靠百度地圖也能正常運營,但是車路云項目的不斷落地會讓自動駕駛安全性和效率不斷提升,讓無人車運營應用場景鋪開,這樣其商業化進程才能加速。
車路云一體化項目背后有著更加廣闊的市場空間。預計到2025年,車路云領域的市場規模將超過7000億元,到2030年,智能網聯汽車的產值增量將達到2.5萬億級別。
百度可以參與建設智能化路側基礎設施(5G通信網絡、C-V2X基礎設施),可以參與建設邊緣云、區域云兩級云控基礎平臺,可以推廣高精度地圖在車路云一體化中應用,當然也能參與智慧公交、城市物流、自動配送等多場景的應用試點。
到時候,千千萬萬個智能交通系統設計與開發、交通安全與應急管理、云平臺開發與運維、基礎設施建設與維護和高精地圖與智能駕駛相關的就業崗位,都會被釋放出來,讓科技進步的帶來的社會效益真正體現出來。